Category: Uncategorized
-
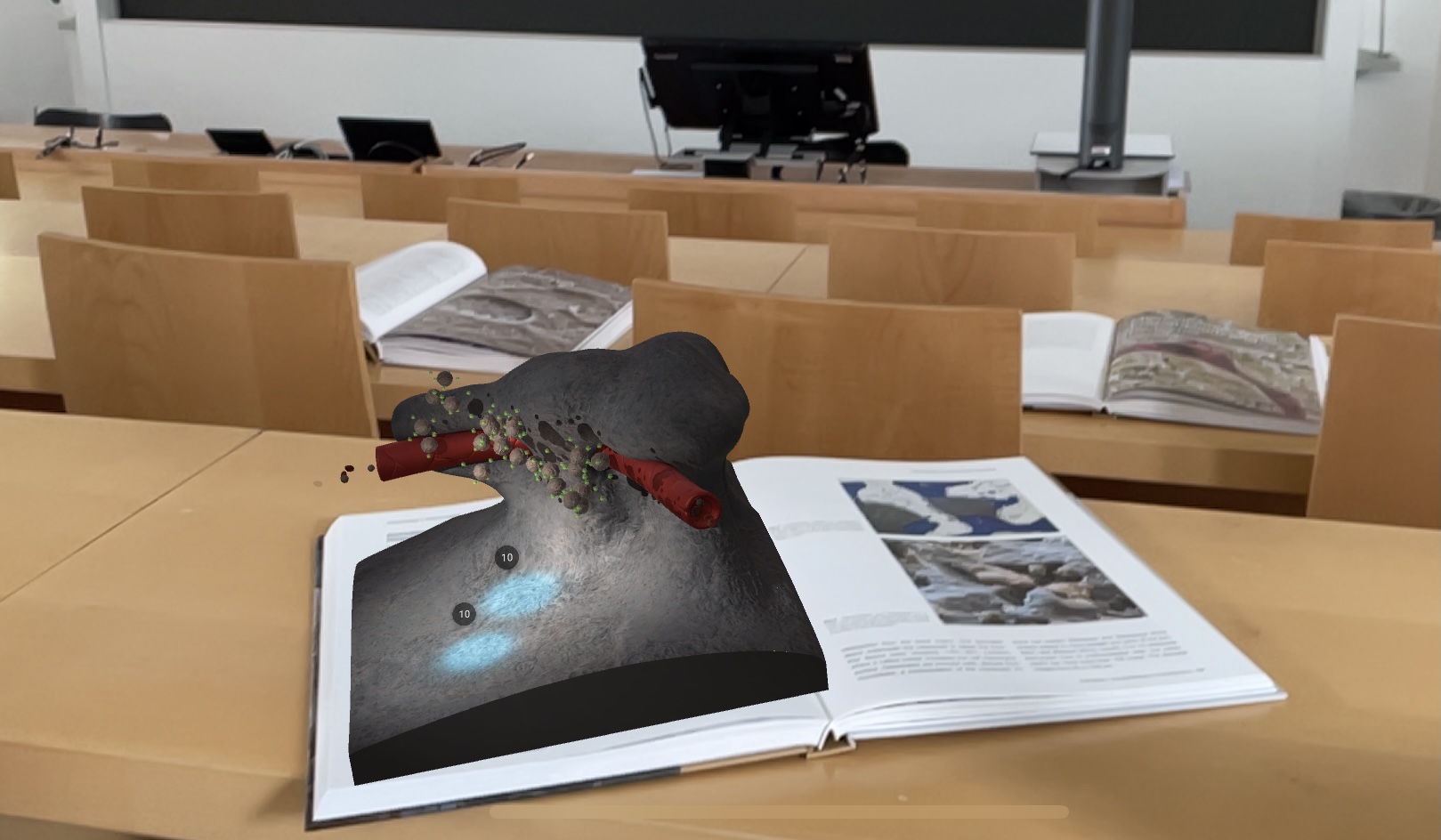
Paper on Game AR Osteoclasts
I ended up as an academic but this week I am happy to announce my newest paper as a first author in JMIR Publications Serious Games on a learning game I created together with the ETH Game Technology Center, University of Zurich, and Medical University of Vienna with support from Quintessence Publishing Deutschland. Our Game…
-
Project start for Open Digital Twin Platform
Last year during my first steps as a postdoc I applied to the institutional Swiss Open Research Data Grants. For my work at the Center for Sustainable Future Mobility (CSFM) at ETH Zürich, I gained the support of Prof. Kay W. Axhausen and Prof. Martin Raubal to submit a project together with the Swiss Data…
-
So you want to build your Unity project on a private jenkins for iOS and Android?
This is a question that recently haunted me. Previously, at the Game Technology Center (GTC) at ETH Zürich, I was privileged enough to sit on a deployed pipeline. It creaks sometimes but in general, it works well. For a new project with Future Health Technologies at the Singapore ETH Center, there was no such luck.…
-
Neuro 140/240 – Lecture 7
Lecture by Jan Drugowitsch at Harvard University. My personal takeaway on auditing the presented content. Course overview at https://klab.tch.harvard.edu/academia/classes/BAI/bai.html Biological and Artificial Intelligence A simple understanding would believe that a brain has a state has is changed via a function and input to produce a behaviour. However, the complexity of the brain makes the function…
-
Neuro 140/240 – Lecture 5
Lecture by Tomer Ullman at Harvard University. My personal takeaway on auditing the presented content. Course overview at https://klab.tch.harvard.edu/academia/classes/BAI/bai.html Biological and Artificial Intelligence The development of intuitive physics and intuitive psychology Turing proposed that an AI could be developed very much like a human – from a empty notebook or child to a developed adult.…
-
Neuro 140/240 – Lecture 4
Lecture by Cengiz Pehlevan at Harvard University. My personal takeaway on auditing the presented content. Course overview at https://klab.tch.harvard.edu/academia/classes/BAI/bai.html Biological and Artificial Intelligence Inductive bias of neural networks A brain can be understood as a network with parameters as 10^11 neurons (nodes) and 10^14 synapses (parameters. Geoffrey Hinton cleverly observed that “The brain has about…
-
Neuro 140/240 – Lecture 2
Lecture by Richard Born at Harvard University. My personal takeaway on auditing the presented content. Course overview at https://klab.tch.harvard.edu/academia/classes/BAI/bai.html Biological and Artificial Intelligence Warren Weaver was the head at the Rockefeller Center in the 1950s and he said the future of engineering is to understand the tricks that nature has come up with over the…
-
Geometry of Big Data – Tuesday session
Session 1 – Graph-based persistence The talk On the density of expected persistence diagrams and its kernel based estimation is given by Frederic Chazal. A draft is available on arxiv. Grow circles around point data to generate a graph whenever other points meet the circle and produce a persistent homology of filtered simplicial complexes (e.g…
-
Geometry of Big Data – Monday session
All talks are summarised in my words which may not accurately represent the authors’ opinion. The focus is on aspects I found interesting. Please refer to the authors’ work for more details. Session 1 – Learning DAGs The talk DAGs with NO TEARS: Continuous Optimization for Structure Learning is given by Pradeep Ravikumar. A draft…
-
Twitter Weekly Updates for 2010-07-25
New@JIndoBlog: Goodbye Indonesia: Last day at Work http://bit.ly/9tQZAm #